闻迪
北京市西城区康乐里小学信息科技教师,北京市骨干教师,现任西城(南)区小学信息科技兼职教研员,曾获得全国中小学实验教学说课活动一等奖,论文、案例等在全国、市、区各类比赛中获奖或公开发表。
设计依据
“以兴趣为起点,以活动为主线”是小学信息科技教材内容设置的重要特点之一。兴趣对学习者有着神奇的内驱作用,能变无效为有效,化低效为高效。国务院于2017年下发的《新一代人工智能发展规划》中指出,要在中小学普及人工智能编程教育。机器人教育作为人工智能技术领域中的重要一环,逐渐得到小学教师和家长们的重视,小学生对机器人的学习也有着浓厚的兴趣。小学生学习机器人的定位是了解、认识和简单编程,本节课从学生学习兴趣出发,对身边的机器人应用进行认知和模拟。
课例特点
本课的教学背景来自学生的日常生活,让学生观察生活中的具体应用激发学习兴趣,进而愿意体验机器人编程学习以及了解机器人传感器的工作原理。教学过程中,学生根据学习需求,利用已经掌握的相关图形化编程的知识,运用乐高EV3机器人编程平台中提供的编程技术,自主探索、自主编程模拟机器人超声波传感器的工作过程,掌握图形化编程中机器人超声波传感器的编程方法,根据新旧知识之间的联系,进一步了解传感器的工作原理,理解机器人工作的具体过程。学生们在编程的过程中感受到科技进步给生活带来的变化和便利,体验到学习程序设计的成就感,进一步激发了探究科学技术的兴趣。
教学目标
1.了解EV3机器人超声波传感器的工作原理和工作过程;2.掌握图形化编程中双分支结构的嵌套编程方法,理解相关算法,培养计算思维;3.感知机器人技术给生活带来的变化,激发学习编程和机器人相关知识的兴趣,体验学习编程的成就感。
教学重点与难点
教学重点:掌握图形化编程中双分支结构的嵌套编程方法,理解相关算法,培养计算思维。
教学难点:了解EV3机器人超声波传感器的工作原理和工作过程。
教学过程
一、激趣导入,明确任务
教师通过展示提前准备好的视频,引导学生了解传感器技术在日常生活中的具体应用,激发学生的学习兴趣。同时教师提出以下问题:1.视频中,跟随主人行走的机器人运用了什么技术?2.机器人是通过什么方式实现这样的技术?
学生通过新旧知识之间的联系,进一步了解超声波传感器在机器人编程中的应用。教师揭示本节课的研究主题:通过编程来学习“智能超声波跟踪机器人”,了解超声波传感器的工作原理和工作过程。
二、合作探究,思维训练
1.了解超声波传感器的工作原理
教师帮助学生回顾学习过的知识,梳理日常生活中的经验,通过实例让学生了解超声波传感器的工作原理,并提出“什么是超声波测距定位”这一问题让学生思考。学生根据图示和自己的理解,解释超声波测距定位的工作过程。
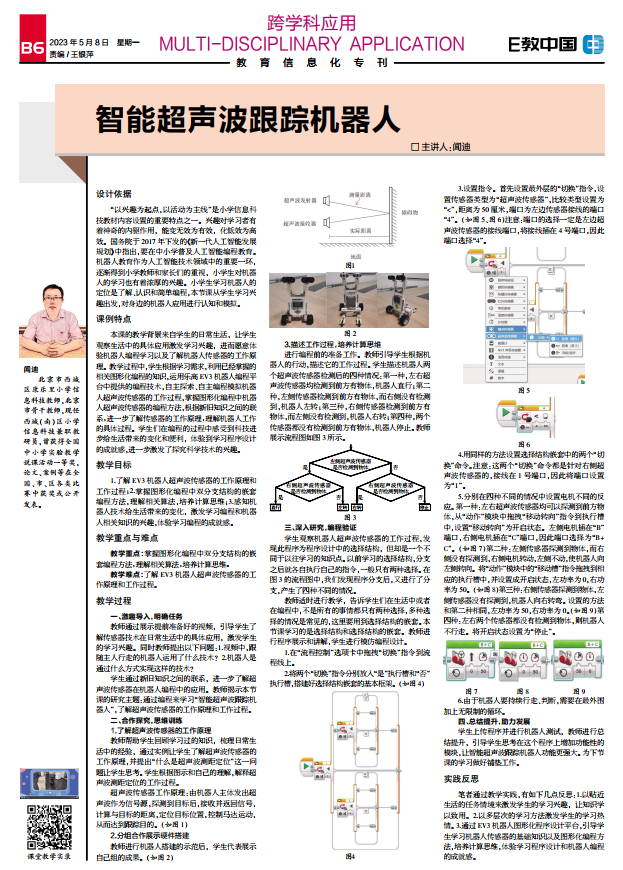
超声波传感器工作原理:由机器人主体发出超声波作为信号源,探测到目标后,接收并返回信号,计算与目标的距离,定位目标位置,控制马达运动,从而达到跟踪目的。(如图1)
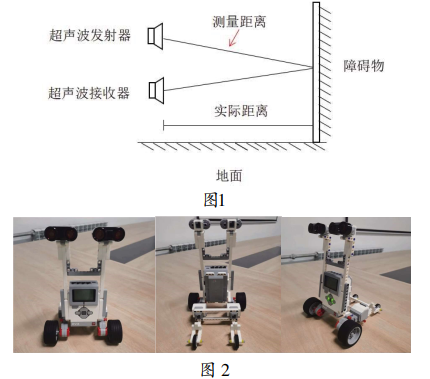
2.分组合作展示硬件搭建
教师进行机器人搭建的示范后,学生代表展示自己组的成果。(如图2)
3.描述工作过程,培养计算思维
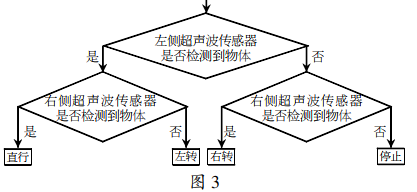
进行编程前的准备工作。教师引导学生根据机器人的行动,描述它的工作过程。学生描述机器人两个超声波传感器检测后的四种情况:第一种,左右超声波传感器均检测到前方有物体,机器人直行;第二种,左侧传感器检测到前方有物体,而右侧没有检测到,机器人左转;第三种,右侧传感器检测到前方有物体,而左侧没有检测到,机器人右转;第四种,两个传感器都没有检测到前方有物体,机器人停止。教师展示流程图如图3所示。
三、深入研究,编程验证
学生观察机器人超声波传感器的工作过程,发现此程序为程序设计中的选择结构,但却是一个不同于以往学习的知识点。以前学习的选择结构,分支之后就各自执行自己的指令,一般只有两种选择。在图3的流程图中,我们发现程序分支后,又进行了分支,产生了四种不同的情况。
教师适时进行教学,告诉学生们在生活中或者在编程中,不是所有的事情都只有两种选择,多种选择的情况是常见的,这里要用到选择结构的嵌套。本节课学习的是选择结构和选择结构的嵌套。教师进行程序展示和讲解,学生进行模仿编程设计。
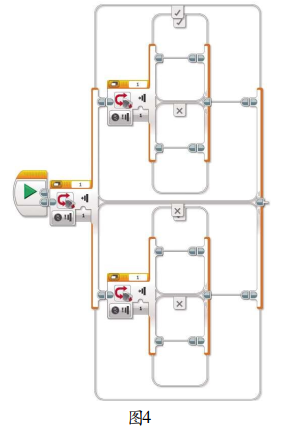
1.在“流程控制”选项卡中拖拽“切换”指令到流程线上。
2.将两个“切换”指令分别放入“是”执行槽和“否”执行槽,搭建好选择结构嵌套的基本框架。(如图4)
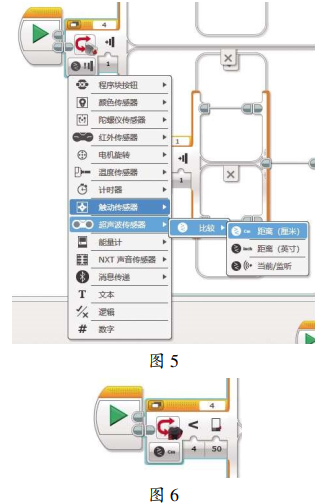
3.设置指令。首先设置最外层的“切换”指令,设置传感器类型为“超声波传感器”,比较类型设置为“<”,距离为50厘米,端口为左边传感器接线的端口“4”。(如图5、图6)注意:端口的选择一定是左边超声波传感器的接线端口,将接线插在4号端口,因此端口选择“4”。
4.用同样的方法设置选择结构嵌套中的两个“切换”命令。注意:这两个“切换”命令都是针对右侧超声波传感器的,接线在1号端口,因此将端口设置为“1”。
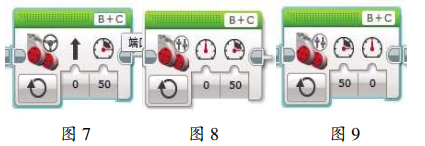
5.分别在四种不同的情况中设置电机不同的反应。第一种:左右超声波传感器均可以探测到前方物体,从“动作”模块中拖拽“移动转向”指令到执行槽中,设置“移动转向”为开启状态。左侧电机插在“B”端口,右侧电机插在“C”端口,因此端口选择为“B+C”。(如图7)第二种:左侧传感器探测到物体,而右侧没有探测到,右侧电机转动,左侧不动,使机器人向左侧转向。将“动作”模块中的“移动槽”指令拖拽到相应的执行槽中,并设置成开启状态,左功率为0,右功率为50。(如图8)第三种:右侧传感器探测到物体,左侧传感器没有探测到,机器人向右转弯。设置的方法和第二种相同,左功率为50,右功率为0。(如图9)第四种:左右两个传感器都没有检测到物体,则机器人不行走。将开启状态设置为“停止”。
6.由于机器人要持续行走、判断,需要在最外围加上无限制的循环。
四、总结提升,助力发展
学生上传程序并进行机器人测试,教师进行总结提升,引导学生思考在这个程序上增加功能性的模块,让智能超声波跟踪机器人功能更强大。为下节课的学习做好铺垫工作。
实践反思
笔者通过教学实践,有如下几点反思:1.以贴近生活的任务情境来激发学生的学习兴趣,让知识学以致用。2.以多层次的学习方法激发学生的学习热情。3.通过EV3机器人图形化程序设计平台,引导学生学习机器人传感器的基础知识以及图形化编程方法,培养计算思维,体验学习程序设计和机器人编程的成就感。