
狄勇 浙江省宁波市海曙区广济中心小学信息技术学科高级教师,市教坛新秀,市学科骨干教师。曾获评首届宁波市中小学生创客大赛优秀指导教师,第四届、第五届全国中小学机器人教学暨创客教育展评活动优秀指导教师。著有《micro:bit超好玩——米爸带你学编程》一书,由人民邮电出版社出版。近年专注于开源硬件相关的课程开发与教学实践,发布相关教程、案例70余篇。
项目背景
高海拔驻边哨所的物资供给一直是个大难题,地区气候多变,直升机运送物资面临很大困难。而且哨所处在边境,可能会误投给敌人。基于此,我们拓展了巧练空投项目。在之前的学习过程中,各项目小组已为TT无人机加装了抛投装置,并进行了空投测试。本项目将在此基础之上,结合AI视觉传感器,基于人脸识别进行定向空投。参与本项目的学生,事先接触过二哈识图(HuskyLens)AI视觉传感器,对传感器的人脸识别功能和相关配置方法有所了解,具备进阶学习的基础。
教学目标
1.学会用创客的方法展开学习,通过创客社区挖掘项目资源。
2.进一步体验人工智能,并运用到无人机的智能导航中。
3.能通过小组协作完成较复杂的项目,从团队协作中获得乐趣和成就感。
教学过程
一、情境导入
师:青藏高原某边防团的墨脱某哨点,驻地在海拔近4000米的深山密林中,每年大雪封山期长达6个月,是名副其实的雪域孤岛。以往官兵靠人力运送物资,费时费力,现在虽然有了直升机协助,但因为高海拔地区气候多变,依然面临很大困难。类似这样条件艰苦的哨所,在“种花家”还有很多。这次,我兔飞行员TT就接到了一个艰巨的任务,要去“雪中送炭”,将补给送至被大雪封山的边防哨所。由于哨所处在边境,到达指定空域后,TT要自动识别敌我,不能误投给敌人。你能协助TT完成这个任务吗?
学生思考并讨论。
二、挖掘社区资源,展开自主学习
创客项目的学习不应停留在传统的一步步的程序式学习。教师在传授学生知识技能的同时,还应该注重让学生掌握创客化的学习方式。创客社区拥有丰富的教程、技术资料、项目案例等资源,是创客孵化与成长的园地,也可以作为创客教学的资源宝藏。教师可向学生推荐一些成熟度高、适用性强、内容审核机制规范的优质创客社区(如DF创客社区),引导学生根据学习支架搜集项目所需的资料和有参考价值的项目案例,尤其是人工智能摄像头相关资料,并梳理项目实施流程。
三、打印结构件,连接安装视觉传感器
二哈识图(HuskyLens)AI视觉传感器的安装需要配合一个3D打印的结构件实现。DF的官方资料里,提供了用于固定传感器的结构件模型文件,可下载后3D打印出来。
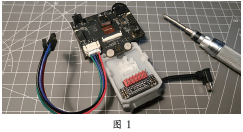
视觉传感器可通过两个螺丝安装在该结构件上。对无人机项目而言,“减重”值得锱铢必较。所以这里可以考虑用尼龙螺丝替代金属螺丝。同时传感器选用的配线也应尽量短些,避免增加不必要的线重,也减少线缆对螺旋桨产生干扰的可能,如图1。
本课的教学对象是参与过无人机开源硬件项目的学生,对线路连接已有些经验。建议让学生自行查找技术资料,列表制订连线方案(见下表),再完成线路连接。教师放手的同时也要注意流程监管,要向学生强调连线完毕后要有质检流程,确认无误后方可上电测试。
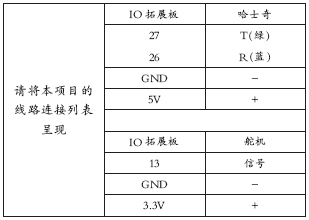
教师需要提醒学生注意,布线完毕后,要手动试转无人机的四个螺旋桨,确保线缆没有对螺旋桨产生干扰,避免影响飞行,如图2。必要时可以用橡皮筋辅助约束线缆。
四、特训二哈,助力TT
1.讲授人脸识别跟踪原理
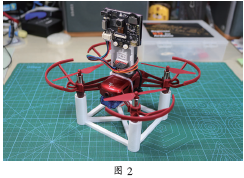
哈士奇的屏幕分辨率为320×240,屏幕中心坐标为(160,120),如图3。
我们可以根据对象方框的中心点坐标,实现目标跟踪。流程推演如下:
当TT飞到指定空域,开始进行目标搜寻。如果目标在屏幕热区左侧,则逆时针旋转飞机;如果目标在屏幕热区右侧,则顺时针旋转飞机;如果目标在屏幕热区下方,则提升飞机高度;如果目标在屏幕热区上方,则降低飞机高度。当目标进入屏幕热区,则锁定目标,向前飞行投放补给,随后返航。
2.基于工作原理,编写程序
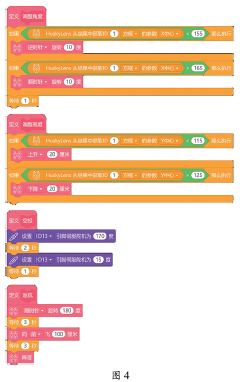
编写“调整角度”“调整高度”等自定义函数程序,如图4,并实现TT无人机起飞、降落、空投、返航等功能。
五、奔赴前线,空运补给
在测试场景营造方面,可用教室大屏幕打出敌我两军头像,如图5,并在适当位置用粉笔或贴纸标注出起降点、物资投放点。

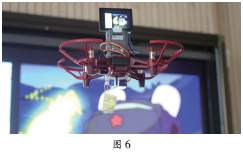
教师可以组织一场别开生面的空运补给竞赛,如图6。从物资投放、返航降落的准确性以及任务耗时这3个维度,对项目进行评比。
六、项目评价
学生们对项目的评价往往聚焦在“奔赴前线,空运补给”这个环节。该环节虽然能评比出结果的优胜,但未必能全面反映过程的优胜。尤其是对这种相对复杂的项目而言,产生意外的变量较多。教师在项目推进过程中还应关注学生小组的过程性评价、表现性评价,让学生在小组竞争中获得成就感,也能在小组合作中获得创造的乐趣。
教学反思
相较于在地面用AI技术引导或控制小车,融合AI视觉技术的空中飞行项目,在实施难度上是几何级的上升。尤其是一些环境因素的影响,会让项目存在很多不确定性。但正因为这些挑战,学生的内驱力被进一步激发。面对人工智能与生产生活的融合,这群经过相关实操的学生有更多维的见解、更深入的思辨,而这正是我们创客教育在技术之外需要关注和挖掘的部分。
除此之外,确保安全是贯穿整个TT无人机大项目的前提,特别是通过AI视觉识别实现无人机导航,存在一定的不可控性,本项目在实施过程中,教师更需对场地的安全设置、学生的安全教育高度敏感。建议在测试场地划分出观摩区,确保学生处于安全范围。(本课件由DF创客社区推荐)



