
《江苏科技报·教育周刊》(双周刊,国内统一刊号CN32-0019),是江苏省唯一以社会立场透析当代中国教育的报纸。秉承“科技推动教育,教育改变人生”的理念,《江苏科技报·教育周刊》一直注意保持与教育前沿工作的密切联系,定位于教育宏观研究,兼顾微观探讨,注重教育文化生态的构建与引导,时刻关注鲜活的教育实态,着眼于教育文化的深层构建,努力赋予教育以深厚的文化内涵,致力打造中国最好的教育媒体。
国内统一刊号:CN32—0019
编辑部地址:江苏省南京市鼓楼区中山路55号新华大厦48楼


| 创意车杆We Can Do |
| 来源:本站原创 作者:主讲人:贺雯 专业指导:王世达 发布日期:2018-11-02 10:27:14 |
|
贺雯 上海市曹杨第二中学附属学校信息科技教师,普陀区教育科研课题“基于计算思维培养的初中信息科技‘Scratch编程’课程实施与研究”课题组成员,曾获普陀区初中信息科技教学评优一等奖,参与撰写了《玩转Scratch创意编程》一书。
学习背景 近年来,Scratch编程已逐步成为培养学生信息素养和计算思维的重要途径之一。本案例选用乐高积木进行“车杆模型”的创意搭建,使用Scratch2.0及WeDo套件完成程序的编写。借助距离传感器,感知与车杆距离的远近,实现对马达开关的控制。调试指令,继而达成“车杆模型”与“Scratch角色对象”模拟起落的同步。旨在通过Scratch作品的设计、制作、分享、交流等过程,引导学生从计算思维的角度去思考、判断、解决和处理问题。
过程与方法 经历按键控制角色对象到利用硬件(距离传感器)控制的转变。 情感态度与价值观 体验从创意想法到完成作品的喜悦。 教学重点与难点 教学重点 利用距离传感器,实现对WeDo创意车杆模型的控制。 教学难点 调试指令,实现“车杆模型”与“Scratch角色对象”模拟起落的同步。
一、模型交流,创设情境 创设“WeDo设计大赛”情境,以“创意设计车杆”为主题,微视频展示小组乐高搭建车杆模型,分享各自创意,交流创作心得。 二、设疑解疑,架构思维 以“按键控制式车杆”为例,通过观察模拟动图,引导学生描述实现过程。出示示例指令,在师生对话、生生交流中,让学生尝试判断指令正误,指出问题,修改指令并运行检测。指令的逐步修正,有助于学生形成目标达成的思维方式,将表达的语言自然过渡到Scratch语句。 对“程序运行意外停止”设疑,观察程序运行中出现的状况,引导学生补充初始化语句,强调程序初始化的重要性。 三、小组探究,获取新知 以“距离传感器控制车杆”为线索,通过观察模拟动图,引导学生分析实现过程。引出距离传感器及主控制器,识别并操作两者相连。小组合作,探究距离传感器参数的意义,小结读取实时数值的方法,归纳参数大小与距离远近的关系。然后编写程序,实现距离传感器对Scratch角色对象的控制。
将“Scratch角色对象模拟车杆起落”视为学习支架,知识迁移,继而利用距离传感器及马达控制WeDo模型。借助马达说明文件,探索与马达相关的指令语句用法。根据各自设计的WeDo模型,调试指令参数,并尽可能保证角色对象模拟与WeDo模型模拟的同步。 五、展示评价,拓展创想 小组作品交流,对比各自设想与最终作品之间的异同。交流完成任务过程中遇到的困难或问题,以及各自解决的方法或途径。
一、WeDo套件的功能介绍 WeDo是一套可以与电脑连接,并进行编程和控制的乐高套装。包括150多个积木组件、1个马达、1个距离传感器、1个倾斜传感器和1个主控制器。本案例主要使用各类积木、马达、距离传感器和主控制器。 将主控制器通过USB接口连接到电脑上。点击“更多积木”,选择“添加扩展”,再点击“LEGO WeDo 1.0”选项,并确定。脚本区新增多条程序指令,可对马达的开启关闭、功率、方向及其他属性进行设置。如图1所示。
二、车杆模型的百变搭建 车杆模型可谓五花八门。按起落划分,大致可分为:左右式、上下式、卷帘式、移动式等。在生活中,左右式最为常见,创意来源于生活,仿照该类型设计的学生作品也占据大多数。
要实现距离传感器对车杆“抬起”和“回落”的控制,就不能忘记为马达和距离传感器预留位置。利用主控制器进行互相连接,借助USB接口再与计算机关联。若能考虑车杆起落的时速,避免单位时间内速度过快,推荐首选“蜗轮蜗杆结构”。该结构类似于齿轮与齿条,能够做到环环相扣,使得传动相对比较平稳。(如图3)
三、距离传感与马达控制 1.距离传感器 距离传感器,用于感应其与某物体间的距离,以完成预设的某种功能。将距离传感器连接至主控制器上,通过物体在距离传感器前移动,并点击“距离”模块,可读出距离传感器的数值。其数值区间在0~100,距离越远,数字越大。 2.马达
四、程序设计与调试 1.需求分析 根据需求,Scratch角色对象与WeDo模型均由距离传感器控制。通过判断距离传感器侦测到的数值是否满足一定条件,决定是否执行后续程序。区别在于,角色对象是通过“车杆”的旋转进行模拟,而WeDo模型则借助马达的帮助,通过设置马达功率、转动方向和启动时长等进行模拟。
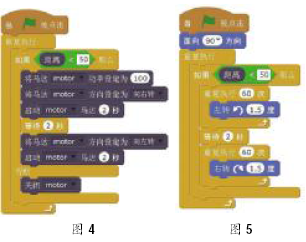
侦测距离,编制判断程序。可用手或物体放在距离传感器前并加以调整,点击“距离”模块来获取相应数值,寻找合适的距离值区间。通过反复执行程序,来验证在此距离范围内马达能否被触发启动。此处需使用“如果……那么……”模块,在条件中,设置“数据和逻辑运算”,实现通过判断距离传感器的值,触发执行。 模拟起落,细化执行过程。为更好模拟车杆逐步抬升/下落,可加入“重复执行 次”“左转 度”/“右转 度”。 当然,为保证程序始终执行,还需在外部嵌套“重复执行”模块。如图4所示。 (2)积木模型的模拟实现 要达成距离传感器对WeDo模型的控制要求,思考方式与之前角色对象模拟大致类似。需要注意的是,程序指令中的具体参数,可根据搭建的模型因物而异,调试后再行确定。(如图5)如果调试中,“车杆”未按预设“抬起”,说明马达的转动方向设置有误。如果“车杆”起落未达到预期位置,说明马达的转动时间过长或过短。为了让“车杆”能够回到初始位置,回落时马达转动方向应与抬起时相反,且持续的时间应相同。
3.完善创新 “若要研发新一代智能车杆,你觉得升级版还能包含哪些功能?”如同抛砖引玉一般,问题抛出后,学生合理畅想,各抒己见。如“再增加1个距离传感器,监测车杆与车辆顶棚的距离,以防擦碰”。又如“按键控制与距离传感控制相结合,形成双控制状态”。再如“为计数编写程序,反馈当前车库停车量,甚至还能提示车库停车位剩余量”。学生的创新意识值得肯定,一些设想也有理有据,不难实现。 教学点评 计算思维的本质是抽象和自动化。本课通过“创意车杆设计”任务,经历了五个解决问题的步骤:一是问题分析,要设计怎样的车杆才能达到要求;二是通过积木搭建,将问题从抽象到具体;三是探索遥控按键、距离传感两种控制车杆起落的方式,体验解决问题的不同方法与策略;四是利用距离传感器,先对Scratch角色对象进行模拟,之后应用于车杆模型,经历问题解决中模拟到真实的过程;五是为尽可能实现模拟角色与车杆模型同步,在调试程序中不断改进程序或模型,经历问题回溯优化的过程。
|





| 发表评论 |