
《江苏科技报·教育周刊》(双周刊,国内统一刊号CN32-0019),是江苏省唯一以社会立场透析当代中国教育的报纸。秉承“科技推动教育,教育改变人生”的理念,《江苏科技报·教育周刊》一直注意保持与教育前沿工作的密切联系,定位于教育宏观研究,兼顾微观探讨,注重教育文化生态的构建与引导,时刻关注鲜活的教育实态,着眼于教育文化的深层构建,努力赋予教育以深厚的文化内涵,致力打造中国最好的教育媒体。
国内统一刊号:CN32—0019
编辑部地址:江苏省南京市鼓楼区中山路55号新华大厦48楼


| 让机器人小车停下来 |
| 来源:本站原创 作者:主讲人:闻迪 专业指导:张铧珊 发布日期:2018-11-02 10:22:07 |
|
闻迪 北京市西城区康乐里小学信息技术教师,北京市骨干教师,现任西城(南)区小学信息技术兼职教研员,曾获得全国中小学实验教学说课活动一等奖,论文、案例等在全国、市、区各类比赛中获奖或公开发表。
“以兴趣为起点,以活动为主线”是小学信息技术教材内容设置的重要特点之一,兴趣对学习有着神奇的内驱作用,能变无效为有效,化低效为高效。
课例特点
教学目标 知识与技能 引导学生认识超声波传感器,了解超声波传感器的工作过程。能够利用超声波传感器测控距离,利用循环结构进行编程。 过程与方法 采用小组合作和自主探究的学习方式掌握机器人编程知识。 情感态度与价值观 引导学生体会程序编制的过程,了解传感器技术在生活中的作用,增强学习机器人编程的兴趣,体验到学习机器人技术的成就感。
教学重点 超声波传感器的工作过程。
师:同学们,上一节课我们利用搭建好的机器人小车完成了一个特别简单的小程序,回忆一下,我们让它完成了什么样的动作呢? 生:机器人小车完成了前进和倒退的效果。 师:请同学们自己复习启动机器人小车程序的操作方法,将上节课存储的小车前进和后退程序运行一下。 学生自主操作,复习上节课启动程序的方法。 教师演示机器人小车行动效果。 师:请同学们观察,老师的机器人小车的行动和同学们的有什么区别? 生:老师的机器人小车在前进和后退之间停顿1秒钟。 师:怎样实现这个效果呢?要使用哪个指令呢?请同学们讨论一下。
生:我们认为应该使用“流程”模块中的“等待”指令。 板书:等待。 师:请同学们分组试一试“等待”指令,能不能实现我们要求的效果。
师:请同学们演示一下你们的操作。 学生演示正确的程序设计方法。(如图1)
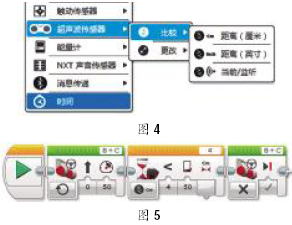
师:在机器人小车的程序设计中,为了让机器人小车的后续动作更稳定,有的时候我们可以使用“等待”指令让机器人小车暂时停下来。刚刚我们是利用“时间”模式让机器人小车暂时停下来,其实,在机器人小车中,我们还可以用等待传感器反应的方法让机器人小车暂时停下来。今天我们就一起来学习传感器的使用方法。 板书:传感器。 二、合作探究,掌握知识 师:我们看看下面的视频,请大家看看这是生活中的什么事物?(如图2)
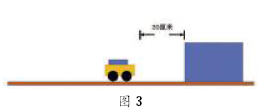
生:这个视频呈现的是生活中的倒车雷达。 师:什么样的装置可以实现这样的效果呢? 生:超声波传感器。 师:生活中有很多地方都使用了超声波传感器,通过超声波发出声波并返回,可以根据超声波传感器探知的距离作出相应的反应。 师:在乐高机器人中也有功能类似的超声波传感器,刚才我们用“等待”指令中的“时间”模式让机器人小车暂时停了下来,我们能不能用超声波传感器同样让小车停下来呢? 师:请同学们观看PPT动画,说一说这个动画体现了一个什么情景?(如图3)
生:实现了机器人小车行驶过程中距离障碍物20厘米停下来的程序。 师:这样的程序设计效果怎样实现呢?同学们可以小组互相讨论一下。 师:请同学们说一说机器人小车的行动过程。 生:机器人小车一直是行走的状态。当判断到前方障碍物小于或等于20厘米的时候,机器人小车停下来。(PPT演示) 师:机器人小车一共完成了三件事情,如果把这三件事落实到程序设计中怎样设计呢? 学生讨论并试验。
学生演示并讲解: 首先拖拽“动作”模块中的“移动转向”指令,进行设置:端口选择器中确认是B+C;模式选择器中选择“开启”。 其次拖拽“流程”模块中的“等待”指令,进行设置:在“模式选择器”中选择“超声波传感器”,在比较模式中选择“距离(厘米)”;在比较类型输入中选择“<”,在阈值中输入“20”。 最后,回到“动作”模块,拖拽“移动转向”指令,进行设置:模式选择器中选择“关闭”。 这样,程序设计就完成了。(如图4、图5)
学生根据演示说明,修改自己的程序设计。
师:请同学们运行程序,看能不能实现在≤20厘米的地方让机器人小车停下来。 生:可以。
师:同学们可以小组讨论一下,看看用什么方法可以实现反复运行程序。 学生进行小组讨论并试验。 生:我们利用了“流程”模块中的“循环”指令,可以实现反复进行程序运行的效果。 板书:循环。 师:你们是怎么设计的呢? 学生演示:在刚才的程序设计基础上用“循环”指令套进去,在“循环”指令的模式选择器中设置“无限制”,这样程序就可以无限运行了。(如图6)
四、总结提升,助力发展 同学们,今天我们更进一步学习了机器人小车的程序设计,知道了让机器人小车停下来的方法,认识了“等待”“循环”等指令,知道了超声波传感器在生活中的应用以及在机器人小车程序设计中的使用方法。今天的学习就到这里。 教学点评 本课教学内容从学生所熟悉的倒车雷达这一身边实例出发,首先带领学生观察生活,体验生活中出现的超声波传感器的实例,确定超声波传感器这一技术需求。在分析思考生活中的超声波传感器实例后,提出利用机器人的传感器设计避障小车的思路,而后根据乐高机器人现有的器材、工具和知识基础,提出了解决问题的策略、方法和关键步骤,以及需要进一步学习的新知识,进而进行实践、探索、验证。整个教学过程以兴趣为起点,以活动为主线,紧紧围绕发现问题—分析问题—解决问题层层递进,引导学生在做中学,体现了技术服务于生活的教育理念。本课教学任务不仅来源于真实的生活情境,更是将生活实际应用与现代信息技术紧密结合,实现跨学科综合学习,很好地培养了学生的综合实践能力与创新精神。(点评人:张铧珊,北京教育学院宣武分院小学信息技术教研员)
|





| 发表评论 |