《江苏科技报·教育周刊》(双周刊,国内统一刊号CN32-0019),是江苏省唯一以社会立场透析当代中国教育的报纸。秉承“科技推动教育,教育改变人生”的理念,《江苏科技报·教育周刊》一直注意保持与教育前沿工作的密切联系,定位于教育宏观研究,兼顾微观探讨,注重教育文化生态的构建与引导,时刻关注鲜活的教育实态,着眼于教育文化的深层构建,努力赋予教育以深厚的文化内涵,致力打造中国最好的教育媒体。
国内统一刊号:CN32—0019
编辑部地址:江苏省南京市鼓楼区中山路55号新华大厦48楼


| 智能采摘机械臂 |
| 来源:本站原创 作者:主讲人:方洪森 发布日期:2018-09-21 14:32:06 |
|
方洪森 上海市普陀区桃浦中心小学信息科技教师,曾被评为宝山区2013年度教育信息化工作先进个人,普陀区教师专业能力评优活动信息科技学科一等奖,并多次带领学生参加市、区级机器人比赛。曾带领学生团队获2016年美国创意建模StoryGames中美交流赛小学组冠军,2016年上海市第八届“海博杯”模型设计制作竞赛活动机电模型小学组一等奖,2017年上海市科技体育嘉年华机电模型竞赛活动小学组一等奖。
学习背景 在课外实践活动中,学生赴果园参与采摘果实,有学生看到苹果树上稍高的位置有几个很好的苹果,可是由于自己个子较矮,怎么跳也采不到。回到学校后,学生提出了这样的问题:在生活中,我们该怎样拿取超出自己手臂长度范围的东西呢?学生们带着这样的问题在课上进行了讨论:我们是否可以借助机器来帮助我们采摘到自己手臂够不到的果实呢?经过讨论,大家一致认为,可以运用乐高中积木的搭建和传感器的编程来制作“智能采摘机械臂”。 学习目标 知识与技能
过程与方法 1.通过小组合作的方式完成触动传感器的搭建。
1.体验探究、创新的乐趣,养成参与意识和团队合作精神,勇于分享并表达自己的想法和观点。
教学重难点 重点:传感器和电机的有效结合,实现机械臂的搭建。 难点:学会正确设置触动传感器控制电机旋转的角度。 教学过程 创设情境 教师引导学生分析:当我们要采摘超出我们手臂范围的果实时,我们该怎么办?学生:需要延长手臂的长度。
构思设计 组织学生以小组为单位设计自动采摘果实机械臂的草图,并使用乐高积木、触动传感器、数据线等,完成相关组件的搭建。
编程调试 在前期讨论和观察分析的基础上,组织学生以小组为单位经历观察现象、发现问题、分析原因、尝试解决等过程,逐步完善编程,让学生设计完成符合真实环境的自动采摘机械臂。 展示评价 组织学生以小组为单位进行作品展示,并向全班同学介绍本小组作品特色、设计思路、遇到的问题以及解决的方法,由教师和其他小组一起对作品进行评价。 拓展创新 提出拓展要求,引导学生对作品进行进一步完善和创新。 案例详解 一、联系导入
本节课中我们将学习制作智能采摘机械臂,让机械臂自动采摘果实。 问题1:如何实现自动采摘过程? 讨论结果:可以利用传感器实现(如触动传感器、超声波传感器和颜色传感器)。经过小组分享结果和讨论后,认为触动传感器最合适。 问题2:机械臂触动到果实时,电机的旋转功率设置为多少合适? 讨论结果:在操作过程中进行测试记录,找出最合适的功率,既能抓住果实,又不会抓得太紧。 问题3:如何实现从采果实到放果实的自动采摘全过程? 讨论结果:采摘和放入篮子的过程中间可以停顿几秒,可以用命令等待来执行,并且需要无限循环,才能实现自动采摘的全过程。 有了以上的讨论过程,学生们基本明确了本次任务的所有情况,并且每组学生对如何构建也有了自己的想法。 二、构建编程
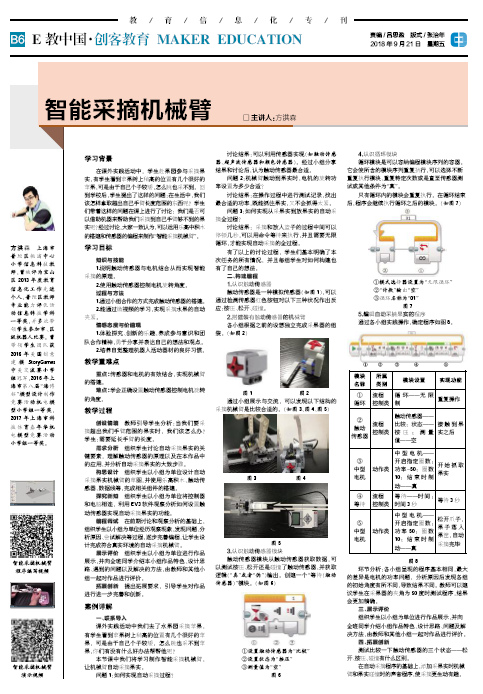
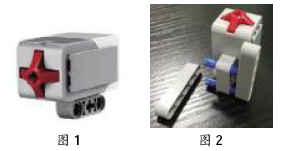
触动传感器是一种模拟传感器(如图1),可以通过检测传感器红色按钮对以下三种状况作出反应:按压、松开、碰撞。 2.搭建装有触动传感器的机械臂 各小组根据之前的设想独立完成采果器的组装。(如图2)
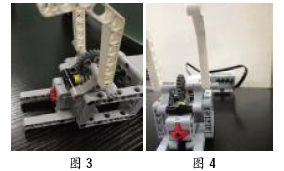
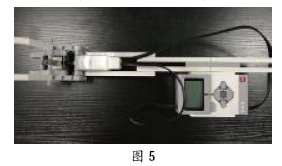
通过小组展示与交流,可以发现以下结构的采摘机械臂是比较合适的。(如图3、图4、图5)
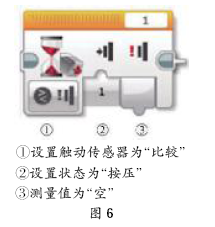
3.认识触动传感器模块 触动传感器模块从触动传感器获取数据,可以测试按压、松开还是碰撞了触动传感器,并获取逻辑(“真”或者“伪”)输出。创建一个“等待(触动传感器)”模块。(如图6)
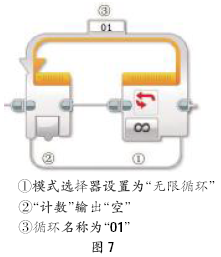
4.认识循环模块
只有循环内的模块会重复执行。在循环结束后,程序会继续执行循环之后的模块。(如图7)
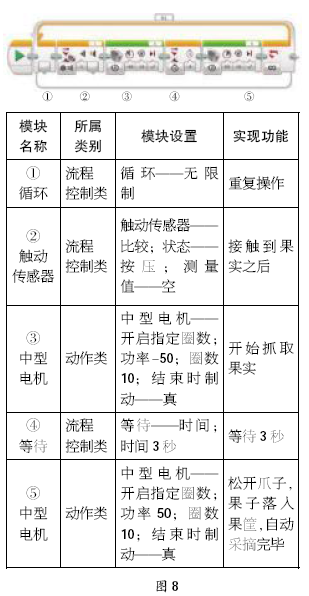
5.编辑自动采摘果实的程序 通过各小组实践操作,确定程序如图8。
三、展示评价 组织学生以小组为单位进行作品展示,并向全班同学介绍小组作品特色、设计思路、问题及解决方法,由教师和其他小组一起对作品进行评价。 四、拓展创新 测试比较一下触动传感器的三个状态——松开、按压、碰撞有什么区别。 在自动采摘程序的基础上,添加采果实时机械臂和果实碰撞时的声音程序,使采摘更生动有趣。
|


| 发表评论 |