陶愉钦 上海市宜川中学附属学校信息科技教师。曾指导学生参加信息学奥赛、上海市雏鹰杯乐高机器人竞赛、手机应用设计竞赛、上海市单片机应用竞赛、上海市青少年建筑模型3D创新模型竞赛等竞赛活动,获得优异成绩。
学习背景
为顺应“互联网+”时代教育和社会发展要求,发挥创客教育在培养青少年创新思维中的作用,本课从智能机器人设计制作入手,使用乐高积木搭建机器人小车,借助陀螺仪传感器获取小车的旋转角度,通过蓝牙实现两辆小车间的无线通信,在LEGO MINDSTORMS Education EV3编程软件(下称“EV3软件”)中利用消息传递模块、数学模块、移动槽模块控制两辆小车方向同步。让学生经历“想象—创造—分享—反思”的过程,培养学生的创新意识。
教学目标
知识与技能:1.使用乐高积木设计并搭建两辆装配陀螺仪传感器的机器人小车;2.描述蓝牙通信的作用,实现两辆机器人小车之间的蓝牙连接;3.使用陀螺仪传感器采集数值,利用消息传递模块、数学模块、移动槽模块实现两辆小车方向同步;4.使用EV3软件进行程序编写。
过程与方法:1.能通过学习资料、网上资料查询、摸索与尝试操作等方式学习新知识;2.经历在程序修改和参数调试过程中提高解决问题能力的过程。
情感态度与价值观:1.体验蓝牙通信在生活中的应用,从而提升学习兴趣,培养创新思维;2.在小组合作学习中能发挥特长,积极承担任务,善于提出自己的观点并和组员协作进步。
教学重点与难点
教学重点:建立两辆机器人小车之间的蓝牙连接,实现主从EV3控制器间的消息传递。
教学难点:利用消息传递模块、数学模块、移动槽模块实现两辆小车方向同步。
教学过程
一、创设情境
不谋而同:事先没有商量过,意见或行动却完全一致,该成语出自《三国志·魏书·张既传》。本课以“不谋而同”这一成语引入,让学生思考怎样实现两辆乐高小车之间的方向同步。
二、需求分析
教师组织学生讨论控制两辆小车方向同步的关键要素,了解蓝牙通信在生活中的应用,分析蓝牙通信在本作品中的作用。
三、探究新知
教师组织学生阅读学习资料、查询网上资料,了解在EV3机器人中实现蓝牙通信的方法,通过摸索与尝试,在两辆机器人小车之间建立蓝牙连接,实现主从EV3控制器间的消息传递。
四、编程调试
在前期讨论和观察分析的基础上,教师组织学生分小组经历观察现象、发现问题、分析原因、尝试解决等过程,逐步完善程序编写,让学生在程序修改和参数调试的过程中,提高解决问题的能力。
五、展示评价
教师组织学生以小组为单位进行作品展示,并向全班同学介绍作品特色、设计思路、遇到的问题以及解决的方法,由教师和其他小组一起对作品进行评价。
六、拓展创新
教师提出拓展要求,引导学生对作品进行进一步完善和创新,请学生发挥想象,设计更有意思的机器人作品。
案例详解
一、了解蓝牙通信
蓝牙(Bluetooth)是一种无线短距离通信方式,使用蓝牙可以方便地在设备之间传输数据。EV3机器人可以通过蓝牙通信功能和其他EV3机器人进行通信,互相传递数据。通过蓝牙连接iPhone、iPad等设备,下载相应的应用程序,然后通过蓝牙对其进行控制。EV3系统中蓝牙协议的工作方式是选择主EV3控制器连接到从EV3控制器。一个主EV3控制器可以连接多达7个从EV3控制器,主EV3控制器可以向每个从EV3控制器发送消息。但是从EV3控制器只能将消息发送回主EV3控制器,不能直接向其他从EV3控制器发送消息。乐高蓝牙设备的通信距离一般在10米以内。
二、EV3的蓝牙连接
在电脑上启动EV3软件,用数据线连接EV3控制器,在界面右下角“程序块名称”处进行修改。(如图1,图2)
假设两台EV3控制器的设备名分别为“EV3_A”和“EV3_B”。
图1
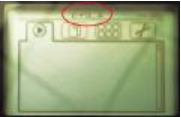
图2
1.EV3_B:在EV3的控制面板中,依次选择“工具”、“Bluetooth”、“Visibility”打钩、“Bluetooth”打钩、“iPhone/iPad/iPod”不打钩。(如图3、图4)
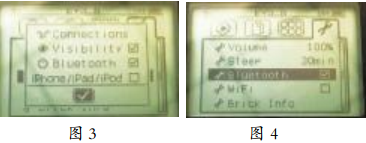
2. EV3_A:在EV3的控制面板中,依次选择“工具”、“Bluetooth”、“Bluetooth”打钩、“Connections”、“Search”、“EV3_B”、“Connect”、“PASSKEY”。(如图5~9)

3.EV3_B:在EV3的控制面板中,接收到来自EV3_A的连接请求,依次选择“Connect”“PASSKEY”。(如图10、图11)
.png)
三、消息传递模块介绍
利用EV3的蓝牙通信功能,我们实现了两个EV3控制器之间的设备连接,但要它们之间能够互动交流,还需要EV3软件中的消息传递模块(如图12),该模块可以发送、接收、比较相应的文本、数字或逻辑。

四、任务分析
我们将主动调整方向的EV3_A作为主EV3控制器,跟随变化方向的EV3_B作为从EV3控制器。
EV3_A的任务就是将自己的陀螺仪传感器角度数值实时发送给EV3_B。
EV3_B的任务是接收来自EV3_A的数字信息,并分析应该如何运动,最后根据分析结果控制电机运动。
五、程序设计
1.主EV3控制器(EV3_A)程序。(如图13)
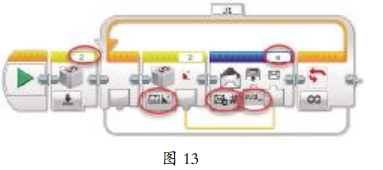
程序说明:启动EV3_A,执行程序,先重置陀螺仪传感器(2号端口);重复读取本机陀螺仪传感器当前测量的角度数值,将该数字借助消息传递模块发送给EV3_B(注意区分大小写),a是消息标题,必须和接收程序保持一致。
2.从EV3控制器(EV3_B)程序。(如图14)
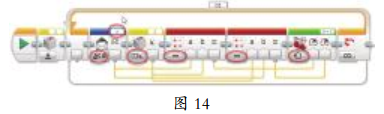
程序说明:启动EV3_B,执行程序,先重置陀螺仪传感器(2号端口);通过消息传递模块重复接收来自EV3_A的陀螺仪传感器角度数字(消息标题a必须和发送程序一致),读取本机陀螺仪传感器当前测量的角度数值(2号端口),使用两个数学模块分别计算两机陀螺仪传感器角度数值差,并借助移动槽模块完成左右电机功率设置,帮助EV3_B小车原地旋转直到两辆小车的陀螺仪传感器角度数值相同(数值差为0)再停止,即实现方向同步。
六、拓展创新
作品展示交流后,可以给学生一些时间梳理设计思路,完善提升本组作品。教师也可提出一些拓展要求供学生挑战,如在EV3传感器中,有“电机旋转”,可尝试通过发送电机旋转的数值,让两辆车保持一致,或者建立手机或平板电脑与EV3的蓝牙连接,实现用手机或平板电脑控制EV3机器人。