吴筝 上海市曹杨第二中学信息科技教师,高级职称,教育硕士。曾获上海市教师教学评优一等奖,多次获中国儿童青少年威盛中国芯计算机表演赛全国总决赛最佳指导教师、最佳组织奖等荣誉称号,多次指导学生在全国、上海市各类信息技术竞赛中获得一等奖。
学习背景
指南车是中国古代指示方向的一种车辆,中国古籍有“车虽回运而手常指南”的相关记载。本课尝试借古创今,使用乐高积木搭建创意小车,借助陀螺仪传感器获取小车的旋转角度,在LEGO MINDSTORMS Education EV3编程软件(以下简称“EV3软件”)中利用数学模块、移动槽模块控制小车运行,使其自动转向指定方向。学生在感受中国古代技术神奇魅力的同时,将创客的教育理念融入具体实际问题的解决过程中,在科学探究中发展学生的实践能力、合作能力和创新意识。
教学目标
知识与技能
1.使用乐高积木设计并搭建一个创意小车。
2.描述陀螺仪传感器的原理和作用。
3.使用陀螺仪传感器采集数值,利用数学模块、移动槽模块实现小车自动转向的控制。
4.使用EV3软件进行程序编写。
过程与方法
1.经历小组合作完成创意小车积木搭建与程序设计的过程。
2.观察分析陀螺仪传感器数值与小车旋转角度的关系。
3.运用阅读资料、自我构思设计、基于学习支架摸索与尝试操作等方法来进行相关内容的自主学习。
情感态度与价值观
1.体验借鉴中国古代指南车的思路,设计现代乐高小车的过程,感受中国古代技术魅力的同时培养创新思维。
2.在小组合作学习中能发挥特长,并积极承担任务,培养合作精神和团队荣誉感。
教学重点与难点
教学重点
1.观察分析陀螺仪传感器数值与小车旋转角度的关系。
2.使用陀螺仪传感器采集数值,利用数学模块、移动槽模块实现小车自动转向的控制。
教学难点
利用陀螺仪传感器模块、数学模块、移动槽模块实现小车自动转向的控制。
教学过程
一、创设情境
指南车是中国古代指示方向的一种车辆,它利用机械传动系统控制车上的木人,无论车子转向何方,木人的手始终指向指南车出发时设置的方向,中国古籍有“车虽回运而手常指南”的相关记载(如图1)。

图1(图片来自网络)
本课以指南车为研究对象,让同学们思考怎样将古代技术思路引入到当今的机器人设计中,开发能自动转回初始方向的乐高小车。
二、需求分析
教师组织学生讨论控制小车能自动转向的关键要素,理解陀螺仪的原理以及在本作品中的作用,并分析驱动小车转向的大致步骤。
三、构思设计
组织学生以小组为单位设计创意小车的草图,并使用乐高积木、陀螺仪传感器、数据线等完成相关组件的搭建与连接。
四、探究新知
教师组织学生以小组为单位将EV3控制器与计算机相连,利用EV3软件观察分析陀螺仪传感器数值与小车旋转角度的关系,大致判断驱动两个电机旋转的参数。
五、编程调试
在前期讨论和观察分析的基础上,教师组织学生小组经历观察现象、发现问题、分析原因、尝试解决等过程,逐步完善程序编写,让学生设计完成符合真实环境的乐高指南车。
六、展示评价
教师组织学生以小组为单位进行作品展示,并向全班同学介绍小组作品特色、设计思路、遇到的问题以及解决的方法,由教师和其他小组一起对作品进行评价。
七、拓展创新
教师提出拓展要求,引导学生对作品进行进一步完善和创新。
案例详解
一、关于乐高小车自动转向的相关讨论
1.需要设定初始角度;
2.需要实时采集小车当前旋转角度的数据;
3.当小车当前角度与初始角度不一致时,持续驱动左右电机让小车原地旋转,直到两个角度一致。
二、陀螺仪传感器的原理、功能与软件模块介绍
陀螺是许多学生玩过的玩具,在一定的初始条件和外在力作用下,陀螺除了不停地自转,同时还会环绕另一个固定的转轴不停地旋转。人们利用陀螺的力学原理所制成的各种功能的陀螺装置称为陀螺仪,它在科学、技术、军事等各个领域有着广泛的应用。比如:回转罗盘、定向指示仪、炮弹的翻转等。
乐高EV3中的陀螺仪传感器(如图2)可检测物体的位移、方向和角度以帮助机器人保持平衡或是确定所指的方向,陀螺仪传感器只能检测单个旋转轴的运动,旋转方向通过传感器外壳上的箭头进行指示。
在EV3软件的陀螺仪传感器模块中,可以测量当前值(角度、速率、角度和速率,如图3),或者与设定值(角度、速率)比较,并输出结果(如图4),还可以将陀螺仪重置(如图5)。

三、观察陀螺仪传感器测量数值,分析与小车旋转角度的关系
在乐高小车上加装陀螺仪传感器,传感器接在EV3控制器2号端口(如图6)。
直接在EV3控制器中观察(如图7)。
将EV3控制器连接到电脑,在EV3软件右下角“硬件页面”的“端口查看”选项卡中进行观察(如图8)。
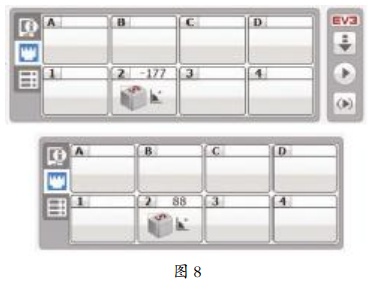
观察分析结论:
角度和速率可以为正数或负数,顺时针旋转为正,逆时针旋转为负,逆时针1周角度数值是-360,逆时针2周角度数值是-720。
注意事项:
乐高陀螺仪传感器的角度可能随时间而“偏移”,导致指向越来越不准确。建议将EV3的固件升级到最高(作者使用的是V1.09E)。
四、程序设计
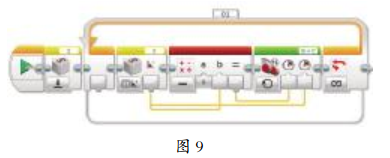
根据之前的讨论,设定小车初始角度可通过重置陀螺仪实现(在EV3中陀螺仪传感器的初始方向数值为0);采集小车当前旋转角度的数据可通过陀螺仪传感器的测量角度实现。
当小车当前角度与初始角度不一致时,如果小车偏向逆时针方向,则驱动左右电机让小车顺时针转回初始角度;如果小车偏向顺时针方向,则驱动左右电机让小车逆时针转回初始角度。
小车的原地旋转可以使用数学模块和移动槽模块使左右电机速度互为相反数;角度数据的实时采集以及左右电机在一定条件下的持续工作需要在循环中实现;当小车不断旋转直到测量角度重新为0时,左右电机速度也为0,即小车停止(程序流程如图9)。
五、拓展创新
作品展示交流后,教师给学生一些时间梳理设计思路、完善提升本组作品。教师也可提出一些拓展任务供学生挑战,如利用“多任务”“等待程序块按钮”等知识,制作可以调整初始方向的小车(即在程序运行中,按一下控制器中心按钮,立即将当前方向设为“0”)。